Modern Mobility
McMaster University Engineering Capstone
Project Description
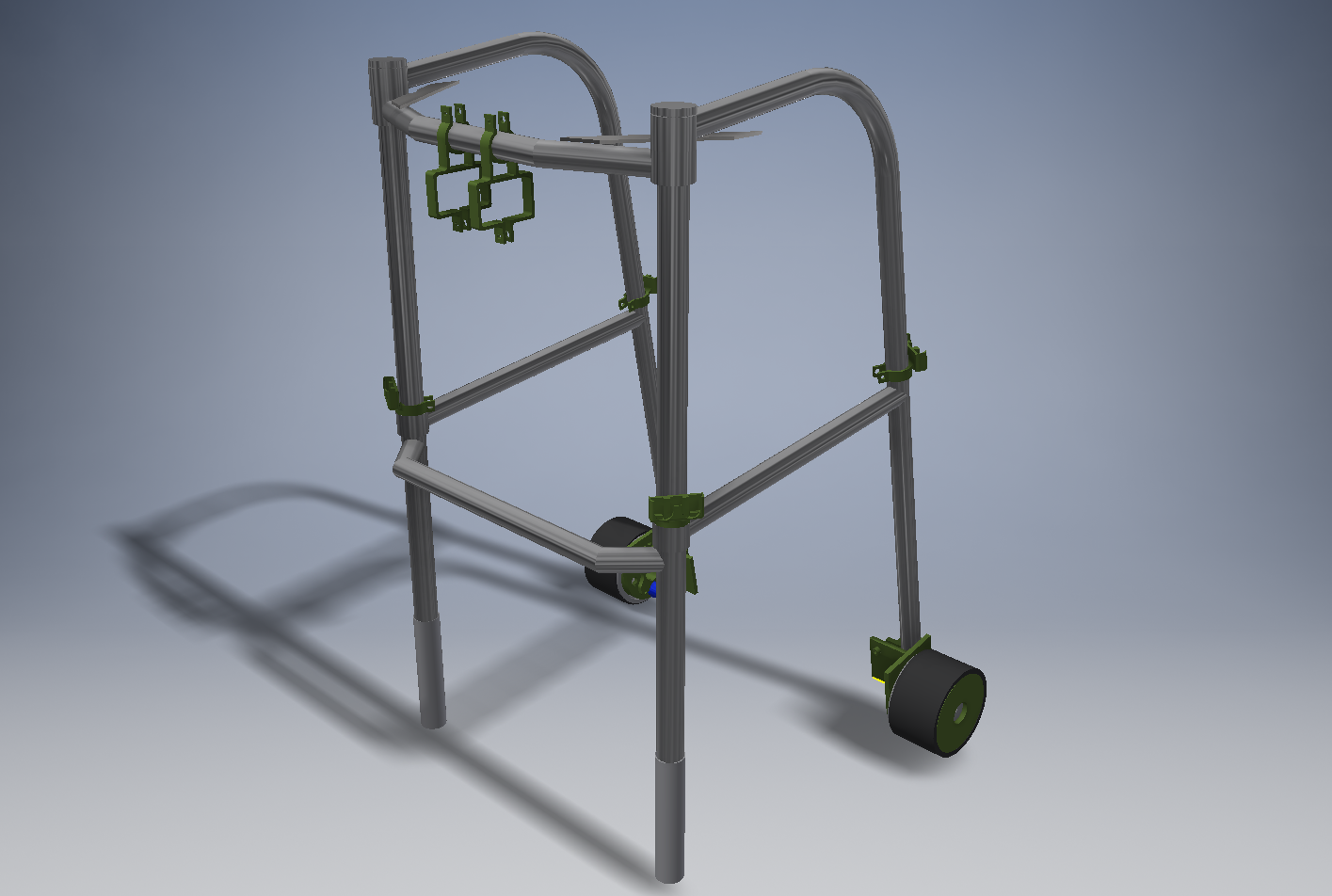
The primary objective of this project was the development of a sophisticated semi-autonomous medical walker. The following lists delineated the primary and secondary goals established for this project, encompassing the envisioned functionalities for the intended user base.
- Adaptation of a conventional walker to autonomously transport itself to a designated 'station' when it was no longer needed by the user. The walker possessed the capability to independently track, navigate, and relocate to predefined 'stations.'
- Implementation of remote user-initiated functionality, enabling users to prompt the walker to return to their location from its current position.
- Integration of advanced safety features, including the walker's ability to actively apply brakes when it detected sudden changes in elevation, such as steep slopes, stairs, or abrupt ground-level drops.
- Enhancement of the core functionalities inherent to a typical medical walker, while incorporating additional features aligning with the aforementioned project objectives.
This project aimed to innovate and improve upon the conventional medical walker, equipping it with intelligent and user-friendly features to enhance the mobility and safety of its users.
Reflection
This project presented notable challenges. Managing a team of eight members dedicated to a single school project could be quite formidable. To ensure efficient operations, we promptly allocated responsibilities. Nevertheless, communication posed some difficulties due to our schedules, making it challenging to convene group meetings. In hindsight, employing a tool like Trello would have greatly facilitated task coordination. Ultimately, the project concluded successfully, resulting in the development of an electric walker capable of autonomously navigating a room while detecting obstacles.